About us


标准化
模块化
多种料仓结构
可选配视觉系统
MES系统
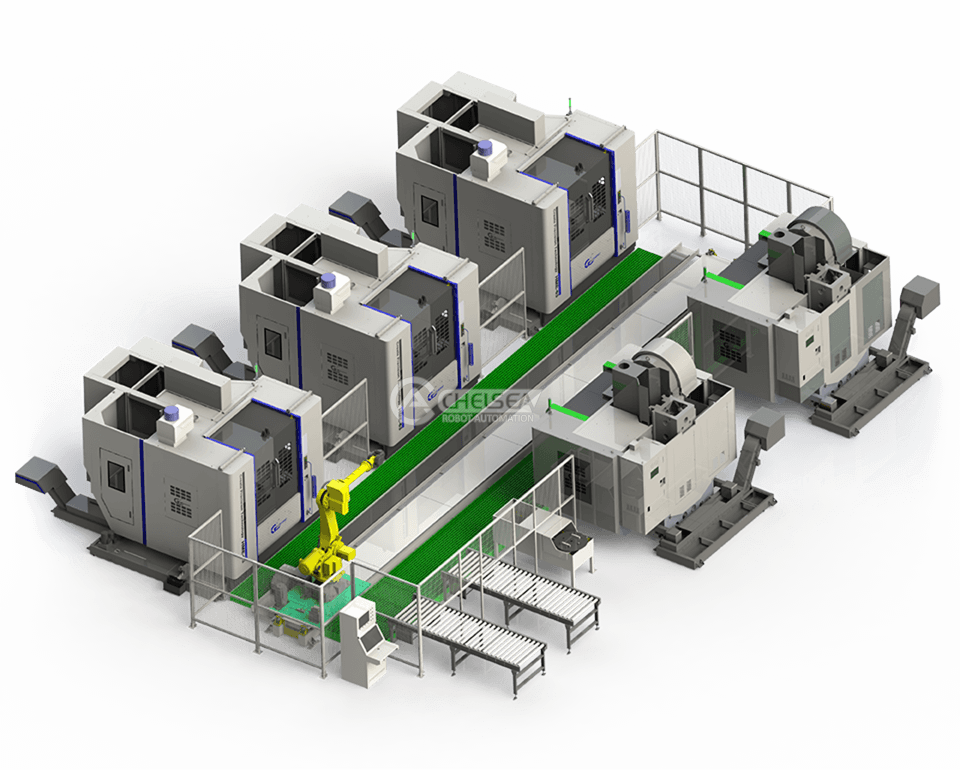
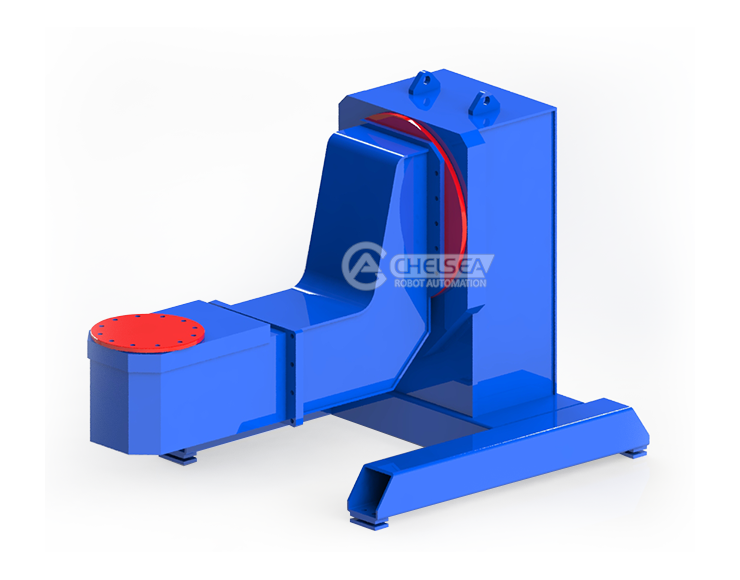
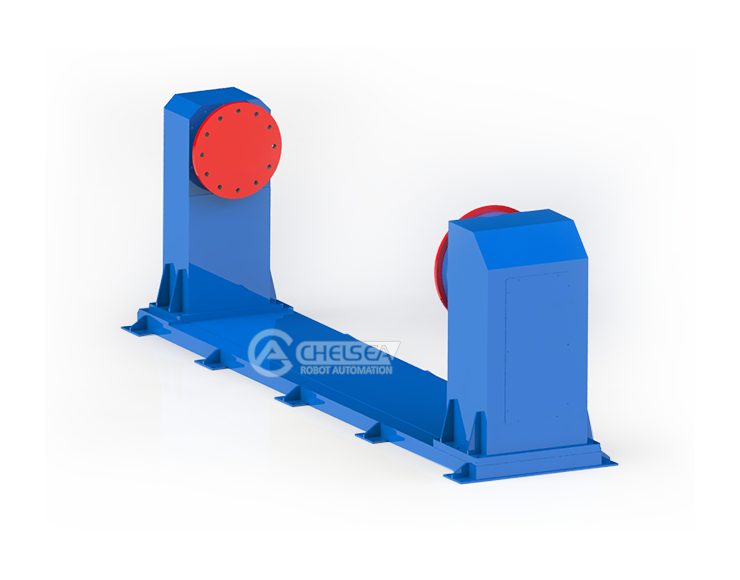
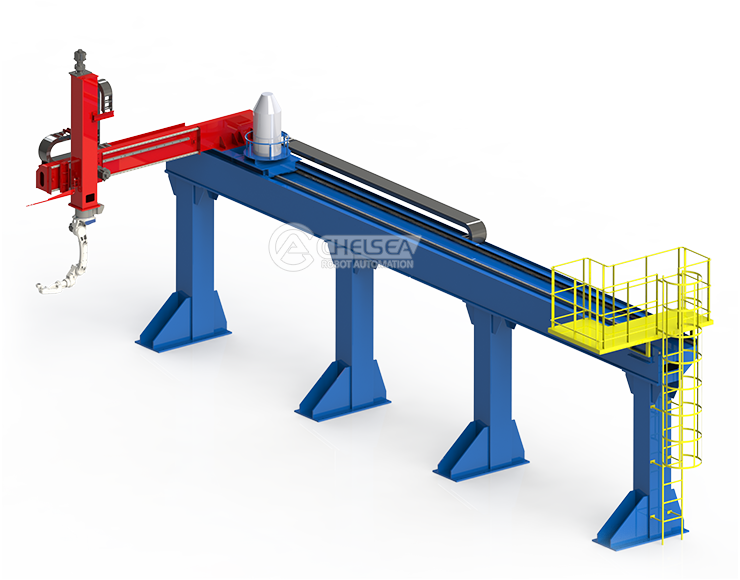
● 地轨采用的是机器人外部轴电机,由机器人统一控制,可以和机器人进行联动协调动作。
● 广泛应用于焊接行业和机加工行业,可以通过地轨把不同工序的设备串联在一起,实现自动化生产。
● 机器人采用正装,通过增加行走机构可以大大提高机器人的覆盖范围。
● 地轨的负载和行程可以进行定制化设计。
● 驱动部分全部采用精密制减速机,确保了反复动作后重复位置精度。
标准化
模块化
多种料仓结构
可选配视觉系统
MES系统
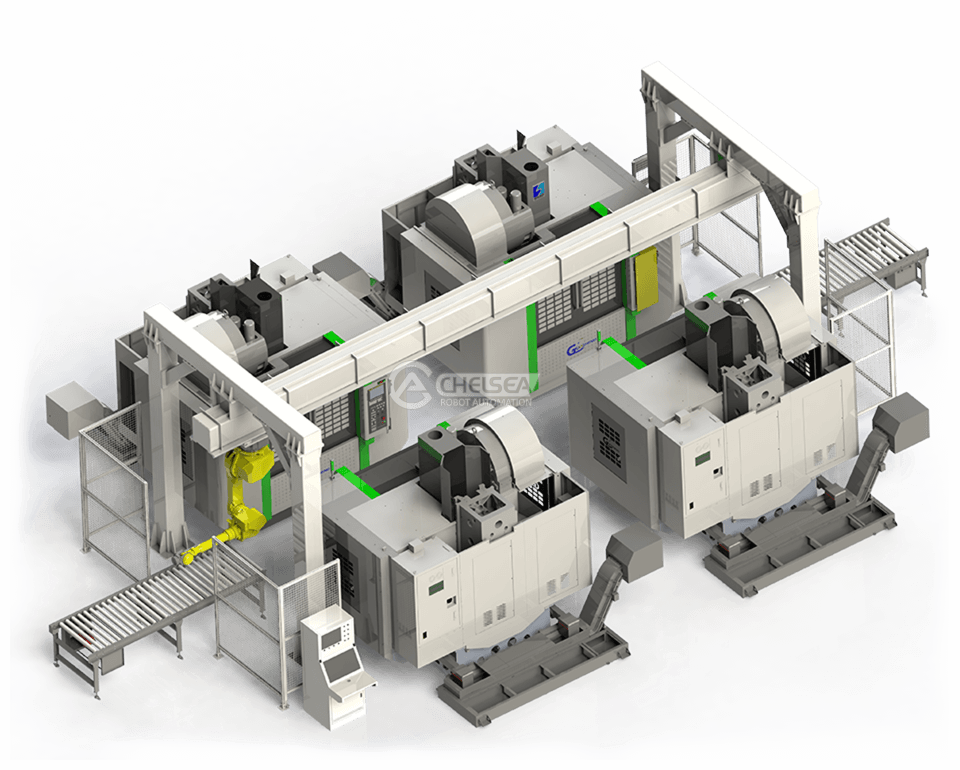
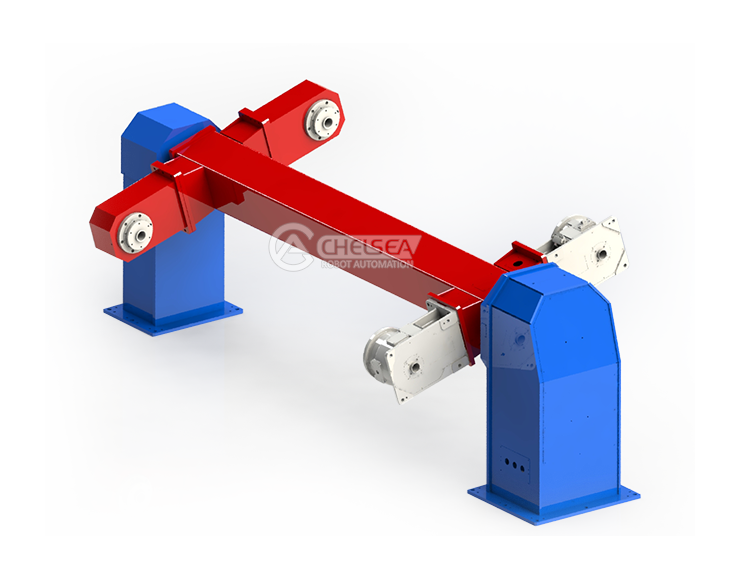
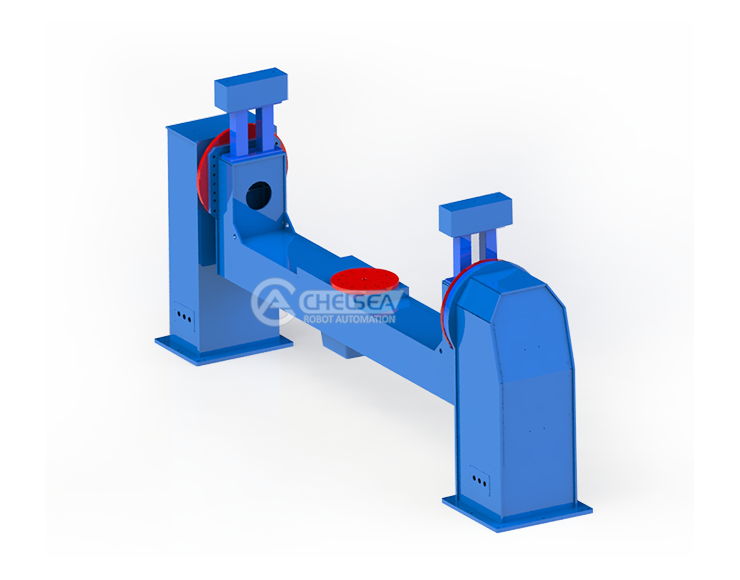
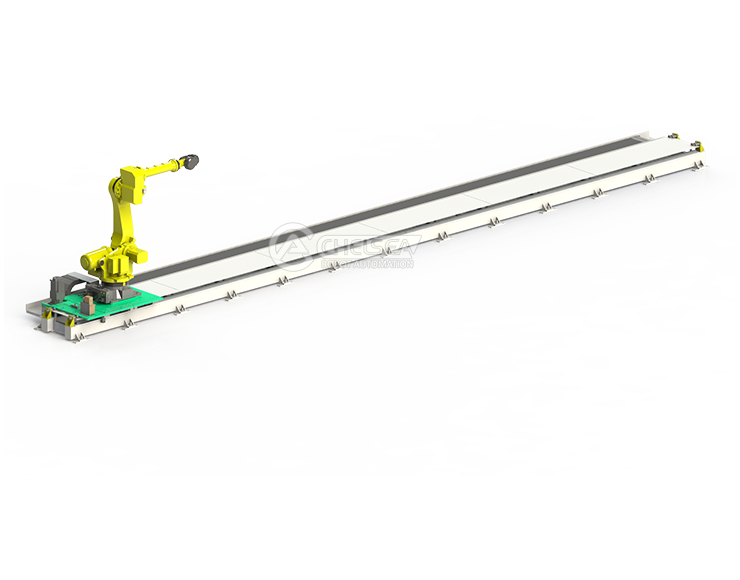
●天吊行走轨道采用的是机器人外部轴电机,由机器人统一控制,可以和机器人进行联动协调动作。
●广泛应用于机加工行业,可以通过轨道把不同工序的设备串联在一起,实现自动化生产。
●机器人采用吊装,通过增加行走机构可以大大提高机器人的覆盖范围。
●轨道的负载和行程可以进行定制化设计。
●驱动部分全部采用精密制减速机,确保了反复动作后重复位置精度。
●易操作、易使用;机床维修方便,占地面积小。
标准化
模块化
多种料仓结构
可选配视觉系统
MES系统
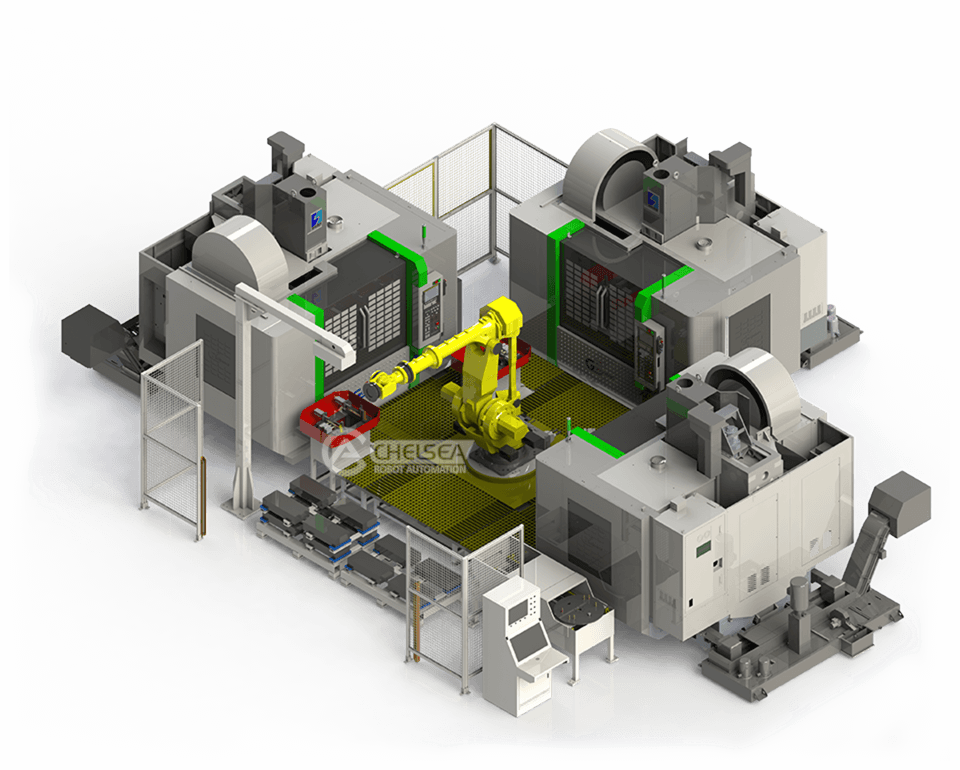
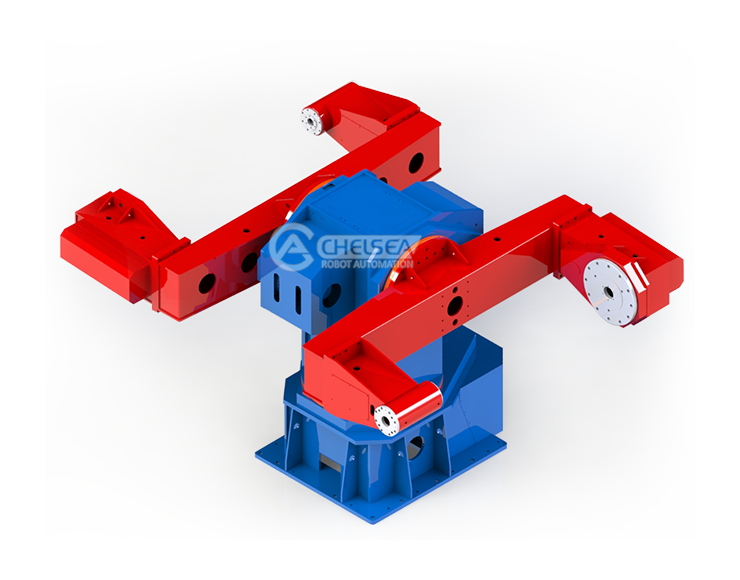
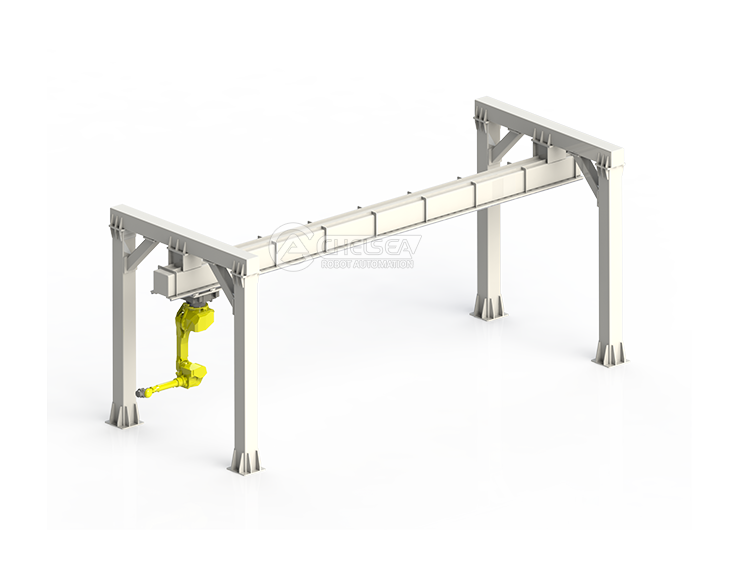
● 工业机器人负载和臂展种类繁多,可以根据产品对象任意选择。
● 6轴关节式机器人相比于直线机构,具有无法比拟的灵活性和通用性。
● 动作快、精度高、稳定性高等优点,特别适用于自动化生产。
标准化
模块化
多种料仓结构
可选配视觉系统
MES系统
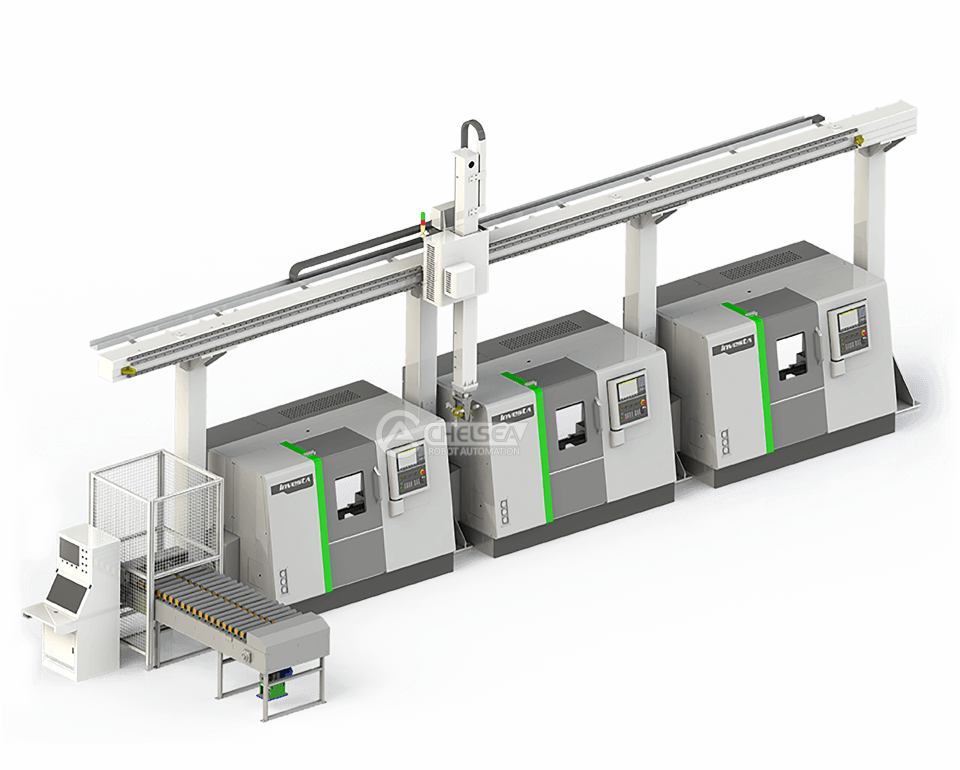
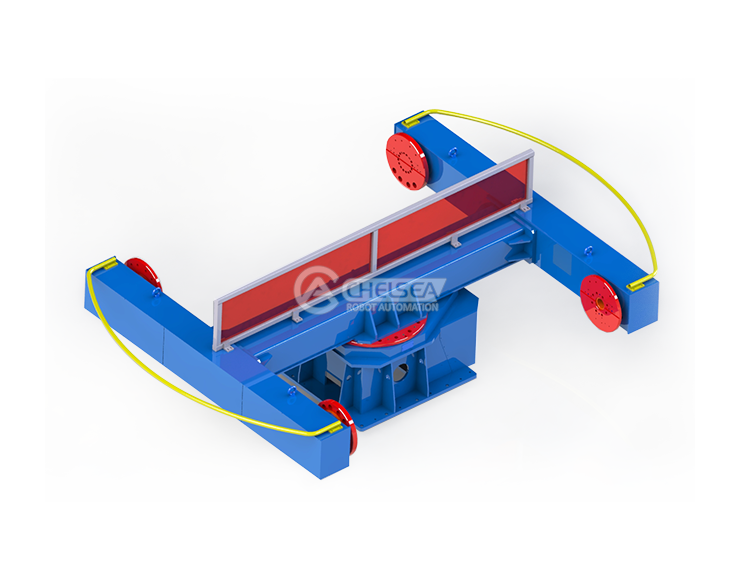
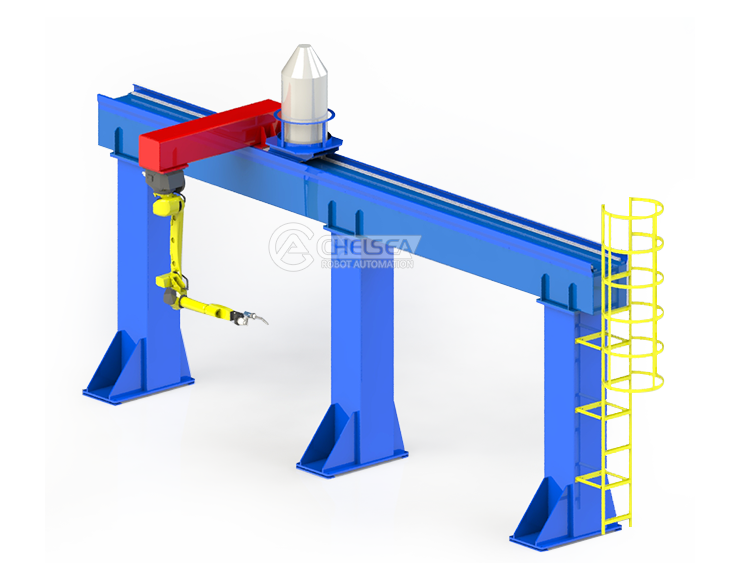
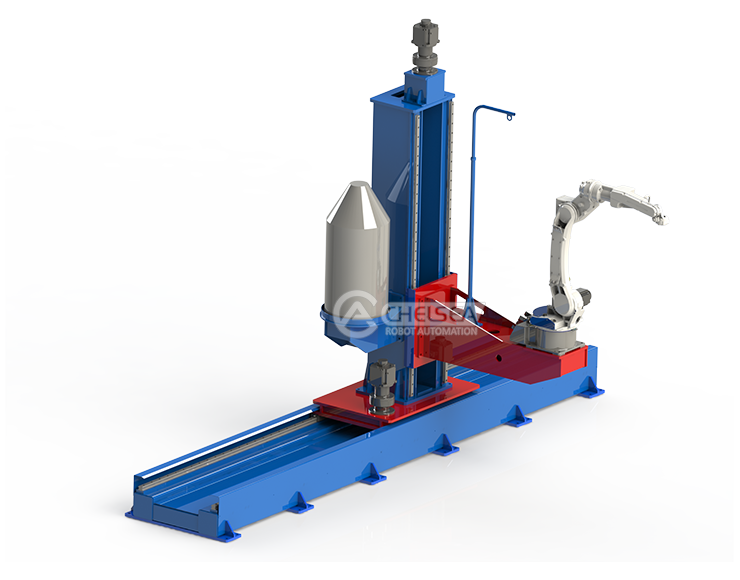
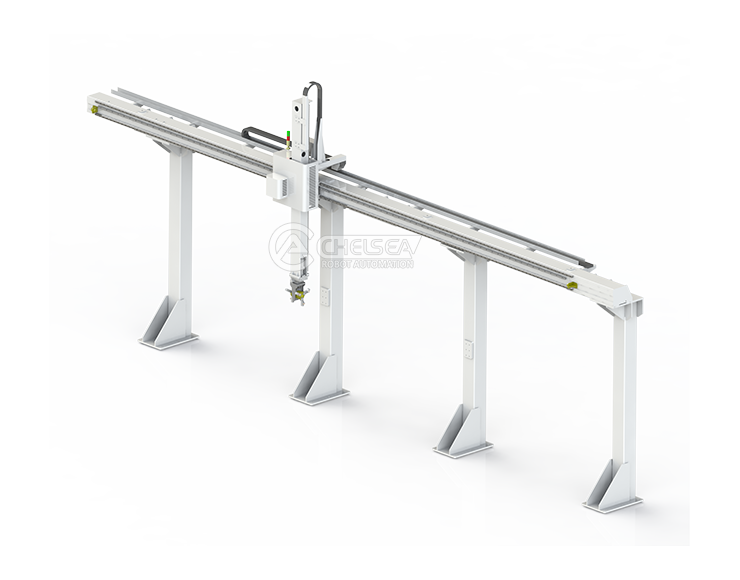
●桁架机械手广泛应用于机加工行业,可以和机床进行组线,实现自动化生产。
●桁架机械手可以进行一轴、二轴、三轴的定制化设计。
●驱动部分全部采用伺服电机配合精密制减速机,确保了反复动作后重复位置精度。
●桁架机械手的承载分为轻型、中型、重型,可提供要求进行定制化设计。
PRODUCT CENTER
About CHELSEA


切尔西机器人自动化(南通)有限公司成立于2019年,位于江苏省南通市崇川 区,是一家智能制造整体解决方案的提供商。通过对工业机器人应用二次开发和周边自动化配套设备的集成,来服务于终端客户,提供交钥匙工程。
公司主要从事机器人焊接、搬运、切割系统、机床上下料、桁架机械手、自动化生产线等的研发、设计、生产、组装及销售。拥有在工业机器人应用方面的专业技术团队,雄厚的技术实力和自动化应用领域丰富的成功经验,致力于成为机器人自动化系统应用领域的中坚力量。
切尔西机器人自动化(南通)有限公司是南通国盛智能科技集团股份有限公司的子公司。国盛集团作为中国机床工具行业协会30强企业,沿着机床产业链形成了装备部件、数控机床、智能自动化生产线三大系列产品,广泛应用于精密模具、工程机械、汽车零部件、新能源等领域,满足用户个性化需求及提供不同应用场景下的金属切削一体化解决方案。
依托集团公司强大的研发和生产制造能力,我们将为客户提供高品质、高可靠性的设备,和有效的智能制造一体化解决方案,以及长期和稳定的售后服务。